MAI
Design on Science & Technology - Robotics
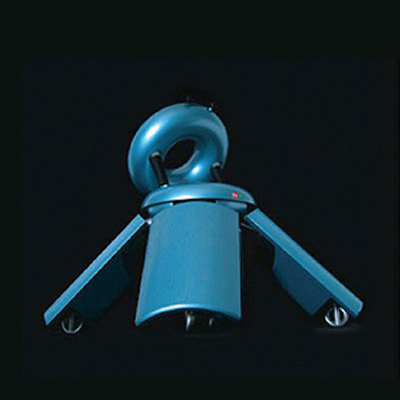
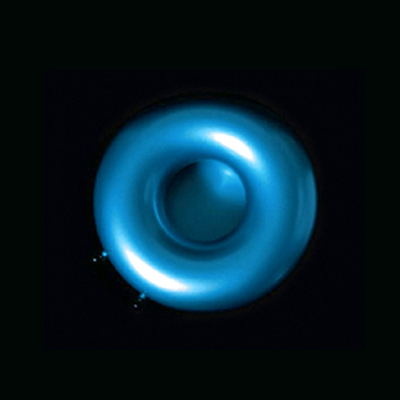
ロボット基礎学の具現化モデル。情報の収集や自動アーカイブ化し、デーダ送信や会話などをおこない、オーナーとのインタラクションを実現。IPv6ネットワークに対応したデータ送受信及び遠隔操作が可能で、拡張モジュールを備えることにより場面に応じたカスタマイズ機能を持つ。舞踊でのカタの動きを身体論的にとらえ直すことで、よりロボットらしさとは何かということを具現化している。
ヒューマノイドという分類を総合化し、形態論と身体論によるダザインコンセプトに基づきつつ、ノームという概念を導入することで、喜怒哀楽といった表情豊かな感情表現を目指した。
「MAI」は接地を伴う脚の運動からの水平方向への所作をロボットの形態へと実装している。





© 2026 Kazuo KAWASAKI. All Rights Reserved.